

电子齿轮
目录
在运动控制系统中,电子齿轮的实现方式是用电气控制技术来代替机械传动机构,通过软件的方法实现机械齿轮速比的调节功能,图1为电子齿轮的机械模型。

图1 电子齿轮机械模型
根据传动比,离合区的不同,主轴带动从轴运动。上位机向伺服系统(运动控制器)发出位置指令,位置指令脉冲有3种形式,如图1.1.1为位置指令脉冲示意图。
① 脉冲+方向
② CW脉冲+CCW脉冲(正脉冲+负脉冲)
③ 正交两相脉冲
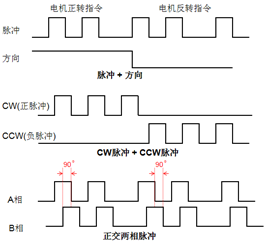
图1.1.1 位置指令脉冲示意图
位置指令脉冲包含电机的位移和方向两个方面,伺服系统的位置反馈脉冲当量(控制器输出一个定位控制脉冲时,所产生的定位控制移动的位移)由检测器(如光电脉冲编码器)的分辨率,以及电机每转对应的机械位移量等决定。当指令脉冲单位与位置反馈脉冲当量不一致时,就可以使用电子齿轮使二者完全匹配。
① 可以大大地简化机械设计,实现多个运动轴按设定的齿轮比同步运动;
② 实现一个运动轴以设定的齿轮比跟随一个函数,而这个函数由其他的几个运动轴的运动决定,一个轴也可以以设定的比例跟随其他两个轴的合成速度;
③ 电子齿轮可以任意决定一个输入脉冲所相当的电机位移量,实现无极调速,提高系统的柔性,运行更加平稳;
④ 在电机启动和停止时,可防止失步和过冲现象;
⑤ 电子齿轮的转动轴分为主轴和从轴,从轴又可看做主轴,主轴带动从轴,从轴只能跟随主轴运动,反之不可;
可以使用同一控制器上任意轴作为主轴。如图2.1.1为GCN400A控制器,其他控制器同样方式,红色区域内可选任意轴作主轴,其他都作为主轴的从轴。
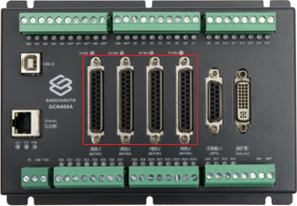
图2.2.1 GCN400A控制器
通过GCS.exe工具对电子齿轮的使用配置进行详细说明。GCS.exe工具连接控制器后,点击功能->电子齿轮,同时打开两个测试轴1和2,如图2.2.1电子齿轮模拟测试。

图2.2.1 电子齿轮模拟测试
在图2.2.1中,Gear 运动模式(电子齿轮运动模式)设置了电机2为从轴,电机1为主轴,主轴类型(规划位置、实际位置、编码器位置)可选,一般默认规划位置;跟随方向(双向、正向、负向)可选,一般默认双向;传动比主轴位移(设置主轴移动位移);传动比从轴位移(设置主轴移动位移);传动比主轴位移和传动比从轴位移之比为传动比,传动比(在机械传动系统中,其始端主动轮与末端从动轮的角速度或转速的比值,就是设置主轴和从轴的位移比值的)可以随时修改;离合区位移(必须大于0,同时不能等于1)可以改变传动比的数据变化,从而让跟随过程更加平滑,离合区越大,则同步过程越平滑;如图2.2.2为电子齿轮主从轴速度曲线,曲线1为主轴速度曲线,曲线2为传动比5:1从轴速度曲线,曲线3为传动比5:2从轴速度曲线,曲线4为传动比5:4从轴速度曲线,曲线5区域为离合区。
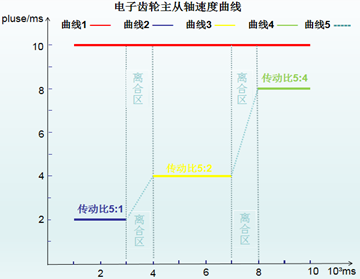
图2.2.2 电子齿轮主从轴速度曲线
当多个从轴跟随同一个主轴,从轴作为其他轴的主轴,如图2.2.3从轴电机作为主轴被跟随运动,电机1为电机2和电机3的主轴,电机2为电机3的主轴,根据传动比不同,电机移动的位移也就不同。

图2.2.3从轴作为主轴被跟随运动
以下为电子齿轮常用功能函数的详细说明。
电子齿轮
函数原形 | 函数说明 |
设置Gear跟随方向 | |
获取Gear跟随方向 | |
设置Gear主轴参数 | |
获取Gear主轴参数 | |
设置Gear跟随倍率 | |
获取Gear跟随倍率 | |
启动Gear运动 |
(1)设置单轴运动速度曲线类型
NMC_MtSetPrfMode( HAND axisHandle, short mode );
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 轴句柄 |
mode | 输入 | 各轴的规划模式 #define MT_NONE_PRF_MODE (-1) // 无效 #define MT_PTP_PRF_MODE (0) // 梯形规划 #define MT_JOG_PRF_MODE (1) // 连续速度模式 #define MT_CRD_PRF_MODE (3) // 坐标系 #define MT_GANTRY_MODE (4) // 龙门跟随模式 #define MT_PT_PRF_MODE (5) // PT模式 #define MT_MULTI_LINE_MODE (6) // 多轴直线插补 #define MT_GEAR_PRF_MODE (7) // 电子齿轮模式 #define MT_FOLLOW_PRF_MODE (8) // Follow跟随模式 注意:坐标系模式不需要通过NMC_MtSetPrfMode设置 |
(2)设置 Gear 跟随方向
NMC_MtGearSetDir(HAND axisHandle, short dir);
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 从轴句柄 |
dir | 输入 | 双向跟随:=0; 正向跟随:>0; 负向跟随:<0;< span=""> |
(3)获取 Gear 跟随方向
NMC_MtGearGetDir(HAND axisHandle, short* pdir);
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 从轴句柄 |
pdir | 输出 | 双向跟随:=0; 正向跟随:>0; 负向跟随:<0;< span=""> |
(4)设置 Gear 主轴参数
NMC_MtGearSetMaster(HAND axisHandle, short masterNo, short masterType);
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 从轴句柄 |
masterNo | 输入 | 主轴序列号:0 ~ N; |
masterType | 输入 | 主轴类型 AXIS规划值:1; AXIS反馈值:2; 编码器值: 3; |
(5)获取 Gear 主轴参数
NNMC_MtGearGetMaster(HAND axisHandle, short * pmasterNo, short * pmasterType);
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 从轴句柄 |
pmasterNo | 输出 | 主轴序列号:0 ~ N |
pmasterType | 输出 | 主轴类型 AXIS规划值:1; AXIS反馈值:2; 编码器值: 3; |
(6)设置Gear跟随倍率
NMC_MtGearSetRatio(HAND axisHandle, long masterEven, long slaveEven, long masterSlope);
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 从轴句柄 |
masterEven | 输入 | 传动比系数:主轴位移 |
slaveEven | 输入 | 传动比系数:从轴位移 |
masterSlope | 输入 | 离合区位移:必须大于0,同时不能等于1 |
(7)获取Gear跟随倍率
NMC_MtGearGetRatio(HAND axisHandle, long *pMasterEven, long *pSlaveEven,long *pMasterSlope);
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 从轴句柄 |
pMasterEven | 输出 | 传动比系数:主轴位移 |
pSlaveEven | 输出 | 传动比系数:从轴位移 |
pMasterSlope | 输出 | 离合区位移:必须大于0,同时不能等于1 |
(8)启动Gear运动
NMC_MtGearStartMtn(HAND axisHandle, short syncAxCnts, short *pSyncAxArray);
参数 | 输入/输出 | 描述 |
axisHandle | 输入 | 从轴句柄 |
syncAxCnts | 输入 | 不包括axisHandle 的其他同步启动轴数量 |
pSyncAxArray | 输入 | 其他同步启动轴的序号:0 ~ N |
/*********此处省略控制器初始化部分***********/
//函数返回值错误 #define RTN_ERR {if(rtn != RTN_CMD_SUCCESS){ return;}}
short rtn = 0; //设置轴二的运动模式为电子齿轮模式 rtn = NMC_MtSetPrfMode(axishandle[1],MT_GEAR_PRF_MODE); RTN_ERR //设置双向跟随 rtn = NMC_MtGearSetDir(axishandle[1],0); RTN_ERR //设置跟随轴一的规划器 rtn = NMC_MtGearSetMaster(axishandle[1],0,1); RTN_ERR //设置传动比5:4和离合区 rtn = NMC_MtGearSetRatio(axishandle[1],5,4,2000); RTN_ERR //启动电子齿轮运动,当主轴运动时,从轴将按照设置的传动比和离合区运动,运动过程中调用NMC_MtGearSetRatio可更新传动比和离合区参数 rtn=NMC_MtGearStartMtn(axishandle[1],0,0); RTN_ERR return rtn; |
① 将电子齿轮先设成1:1,为消除反向间隙的影响,确定待运动的方向后,先沿此方向运动一定的距离(如2毫米);
② 坐标、状态清零,或使用设定值(如1000毫米)的运动。沿刚才的方向单向移动一个距离(如1000毫米),此距离应足够大(理论上越大越精确);
③ 修改电子齿轮值后,校核运动精度,如果满足精度要求,则记下此数值,以备丢失时使用。如果误差过大,则重复此操作,或对上述值进行修正。注:对于使用伺服电机的用户建议更改伺服驱动器的电子齿轮,而将系统的电子齿轮设置为1:1;
④ 电子齿轮一般应使分子(主动轴)小于等于分母(从动轴),不要分子大于分母;
⑤ 如果使用交流伺服,尽量将控制系统的电子齿轮设置为1,而改变伺服驱动器的电子齿轮设置;
⑥ 电子齿轮的分子、分母均不能为零、负数或小数;
⑦ 电子齿轮可对丝杠、齿条的线性误差进行线性的补偿;
⑧ 系统的电子齿轮可与步进驱动器的细分数、伺服电机的电子齿轮结合在一起修改。从而保证电子齿轮的比不超过1。总之,系统以设定的高速运行时,其输出的高频率应<150khz。否则将出现不准确的现象;< span="">
⑨ 当使用步进电机,且电子齿轮比为1:1时,系统运动过程中的振动、噪音将降低,否则有可能出现一定的振动或噪音;
⑩ 电子齿轮比的倒数为脉冲当量:系统发出一个脉,机械实际运动的距离(单位:微米);
11 在函数中,有三种编程对象,对于单轴控制的指令是以 NMC_Mt 开头,对于坐标系的指令是以NMC_Crd 开头,其余是对控制器的指令;
12 文档只挑选常用功能,更多功能请关注头文件,在里面做了详细的注释;
13 如有其他疑问,请联系技术。
下一篇:高川运动控制器固件升级方法
Copyright ©2020 深圳市高川自动化技术有限公司 版权所有 备案号:粤ICP备2022048856号




